From last year’s Bay Area Maker Faire we learned a lot about what is the right and wrong way for our robots to move. Our first designs did not work well on the rough and uneven surfaces, and our bi-pedal design fell over before the gates even opened. From that experience, we have opted for a centaur design for the new legs, leveraging a more powerful engine, a collapsible design, and gears.
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please take a look at our disclaimer.

The legs are more simple overall but still require a lot of parts. We moved to using hardwood for the critical components for its strength.
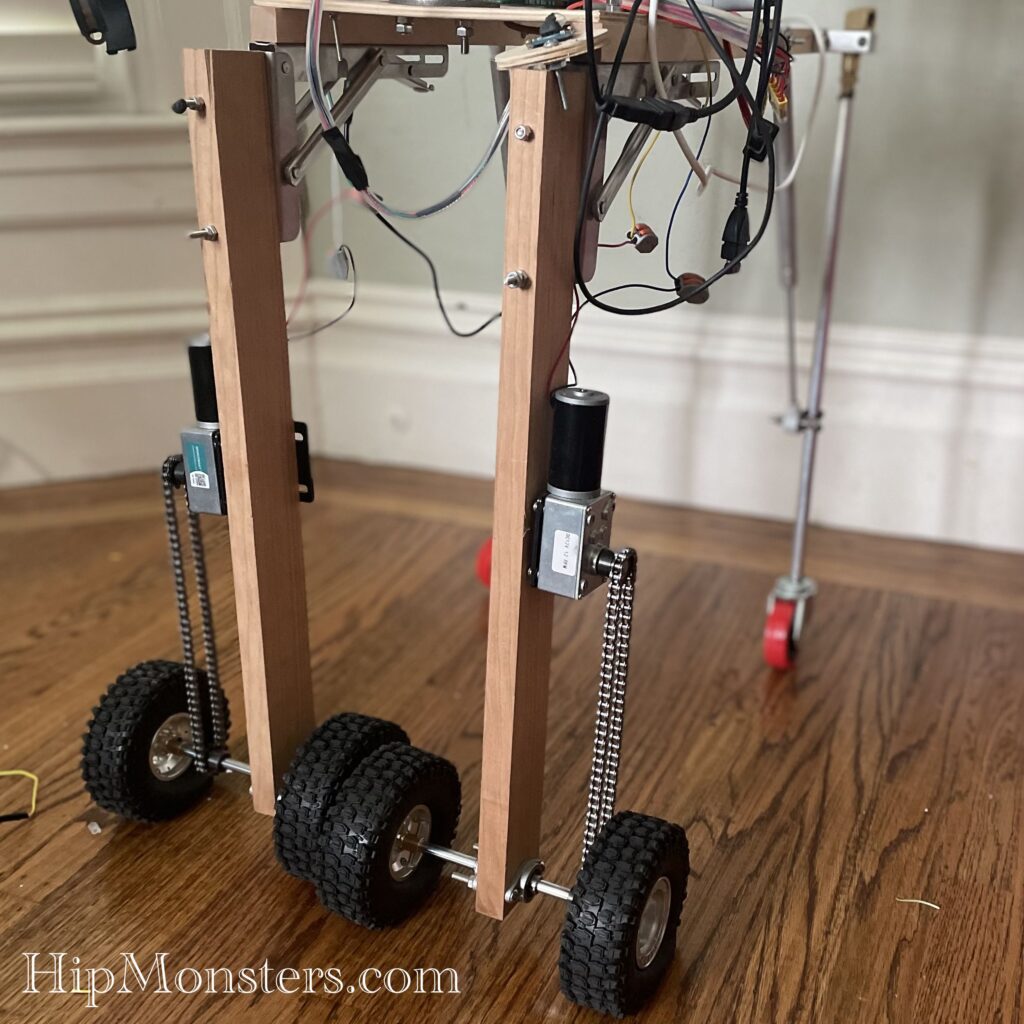
Our design changed a lot from the one at last year’s Maker Faire. First, each leg has two wheels connected to a axel. The motor turns the axel via a chain. The biggest change is the legs now fold and unfold to make transportation easier.
Here is a close up of the finished axel on the end of the leg with one of the gears.

Here is one of the leg connecters that allows the new legs to fold for travel. They can lock in place when the robots are standing or walking.


Here are the legs with the wheels attached.



Here is a close up of the chain with one of the pins almost removed.



Happy Creating!