We are very excited to announce HipMonsters.com will be presenting RobotFreedom at this year’s Bay Area Maker Faire, September 26 through September 28th at Mare Island! We have been training our emotional robots for over a year, living with them, playing with them and watching them grow. Come see our robots in action live!
Here is a recap of the 2024 Bay Area Maker Faire to give you a preview of what to expect. These are some of our favorite exhibits, from an underwater robot explorer to a giant inflatable cuttlefish car.

This is the Maker Faire Bazaar, where visitor can find all sorts of handmade goods, like dice, pottery, and even 3d-printed hot chocolate.

This is a big working model of the solar system that is the size of a room. All of the planet’s orbit times are proportional to the real ones.

This is a small model of a bakery with working lights and miniature baked goods.

This is an old battlebot, complete with two giant spikes in front and four googly eyes (Maker Faire 2023).

This is the Humanoid Robot Comedy Show. These robots can move their faces to show facial expressions and look you in the eyes while they tell jokes.

This robot is built for battle. This is one of the robots that fights in an arena against other robots. It is remote controlled and has arms that can swing around.


This small robot is built by ROV Tour: Underwater Robotics Adventure. They are remote controlled and have cameras that can show footage of its underwater adventures.

And the award winning After.AI whose 3D printed mechanical flip signs were so fun to watch!

This amazing clock uses a whole wall full of gears to tell time.

This is a part of Serenity, an art exhibit showing three insects that shoot fire at a press of a button (Maker Faire 2023).

These are parts of Astro Botanicals Space Garden, which is a collection of glowing handmade inflatable plants.

This is Sepia Lux, a giant inflatable cuttlefish car that lights up. The tentacles and the fins of the cuttlefish can move, and the eyes can change colors.

This is a truck inspired by a beetle complete with wings and a bright green shell.

This is a peacock vehicle that lights up and moves.
We are looking forward to seeing you all at this year Bay Area Maker Faire!
Hope you find inspiration!




































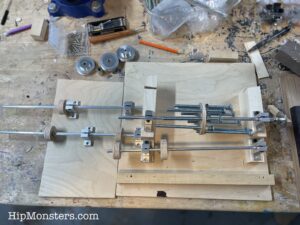
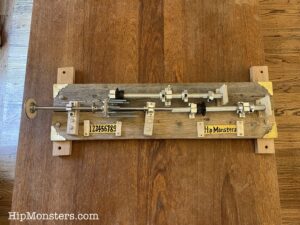
 Here is the final design of the bell hopper.
Here is the final design of the bell hopper.