Mandrake roots are a mythical plant that has a root that looks like a person. They scream when they get pulled out of the ground, and hearing the screams can knock you out, or even kill you. They are featured in Harry Potter, but were invented before that. For more information, go to the article above.
The Supplies
For our mandrake roots, we used a type of foam-like clay called Foam-Mo. Foam-mo is really useful for making organic details like plants and animals. It air-drys and can be painted, but has to be sprayed with a plastic spray, or else it will disintegrate. We recommend using several layers of the under-coat spray for maximum protection. We painted the mandrakes with acrylic paint.
Make sure to use a nonporous surface for a build table or the Foam-Mo will stick to it once it dries. We used old cutting boards.
Making the arm
To make the mandrakes, we made ovals for the head and body, and tubes for the legs. We also rolled out thinner tubes for the tree branches and flattened small diamond shapes for the leaves. We used a pencil to made the lines in the leaves and to make the eyes, lines on the body, and the mouth. Remember, no two mandrakes are the same, so make them all slightly different.
Attaching the arm
Foam-mo is pretty delicate, so we needed to be careful when attaching stuff. To make it hold it’s shape, we used stuff to prop up the mandrake roots while they were drying. to make the edged look like roots, we gently pulled out thin strands of Foam-Mo at the end of all of the limbs.
After painting
After the Foam-Mo dries, we sprayed it with a plastic spray and painted it with acrylic paint. We painted them all slightly different shades of brown and green.
A potted mandrake!
Please DO NOT water your mandrake, even if they tell you to! They are definitely not waterproof.
Inspired by Harry Potter, we made our own Hand of Glory out of Foam-Mo and paint for Halloween.
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
Foam-Mo is a foamy clay that we use for many of our projects. It is great for making organic stuff like plants and animals. After it dries, you spray it with a plastic coating to make it last longer. You can paint over the plastic coating.
For our first attempts, We used our own hands as a model to make them, but we felt like they didn’t look very much like magical objects. They were also very flat and 2d looking, not like the real hand of glory at all.
For our final hand of glory, we made the fingers more long and skinny to make it both more realistic and creepy. To get the shape, we rested it over a bowl to dry. We also added more texture to make it look more like dry skin instead of making it smooth. We also defined the knuckles more to make it more creepy. like it is trying to grab you. We also added more of a wrist to make it more like it is in the movie, and so we could easily mount it.
Once we finished the hand, we made a wooden stand for it to be mounted on. We stained it and sanded it to make it look distressed, and made a wooden plaque. We attached the Hand of Glory to the stand by screwing it in.
The completed Hand of Glory
This is it completed! It is a great addition to our Halloween decoration cabinet, just don’t touch it, unless you want it to grab you.
We wanted to give people a scare on Halloween and was inspired by a visit to Rosicrucian Egyptian Museum so we set out to make our own mummy, George the mummy (he got too curious).
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
Materials
For the mummy, we used:
A roll of burlap fabric
Lots of brown shipping paper
Chicken wire
Aluminum fense wire
5 1/4×1/4X 5 Wood
Twine
nuts and bolts.
We needed it to be pretty light so we didn’t use a lot of wood and padded the skeleton with lots of shipping paper. We had been storing the shipping paper for years and had bags of it in a closet for just such a project. It is perfect because it looks like old dried skin!
Cutting the joint
We wanted George to be flexible so we could place him through out the house and even take him on car trips.
Close-up of the joint
This is one of the joints that we made. George is fully articulate but not powered like our robots.
Trimming the sides
We cut small pieces of the wood off to make it more rounded then sanded the edges to get a clean joint. Since these joints would not be seen we used only rough grade sandpaper.
The finished joint
We drilled holes in the joints so that we could put them together. To drill the holes we clamped the two pieces together to assure the holes would align.
Putting them together
We used a rubber washer between the two pieces so George would not be too wobbly. After screwing the bolts down we crimped end to make sure they would not come undone after George was finished.
Starting the head
We used chicken wire to start making the shape of the head. The chicken wire was so sharp so we had to be extra careful not to cut ourselves. Best to let a parent do this part. One trick we used was to warp the end pieces in duck tape to make them less pocky.
The basic shape of the head
We molded the head into shape. We recomend wearing thick gardening gloves because the chicken wire is very sharp.
Wrapping it in paper
We wrapped it in paper to make it less sharp and because the paper looks like dry skin. The paper alos helps makes the linbs more circlular.
George’s head with the skin
The head fully wrapped in paper.
Securing the paper
We secured the paper by tightly wrapping it in twine. we used twine because it is strong, but also because it is the same color as the paper, so if a little shows it would blend in with the paper.
Wrapping it in burlap
We wrapped it up in burlap after we finished securing the paper. We did several layers so it wouldn’t come off and towards the end split the burlap into multiple strips
The completed head
After the head was done it was on to the rest of the body. The wooden skeleton we made as simple ae possible and used bolts and bolts with crimp washers to make sure it would not come loose after the wrapping for completed.
Put it together!
Now assemble the skeleton and wrap the body in the same fashion as the head. Wrapping the hands and feet proved to be very hard, and we ended up not making wooden fingers, we just wrapped the arm and secured the ends.
Waiting to be wrapped
Here is the completed skeleton fully covered in paper and tied together with twine. We needed to remove the final wrapping from the head in order to better integrate it to the body. Also, we tried using left over hand from out Hand of Glory project but in the end, they did not look as real as we want.
The side viewFront view
Now you can see George out of the workshop! We originally tried to make him be able to stand up on his own, but that would mean either making the body weirdly small or making the feet gigantic. We ended up attaching him to a lamp post instead.
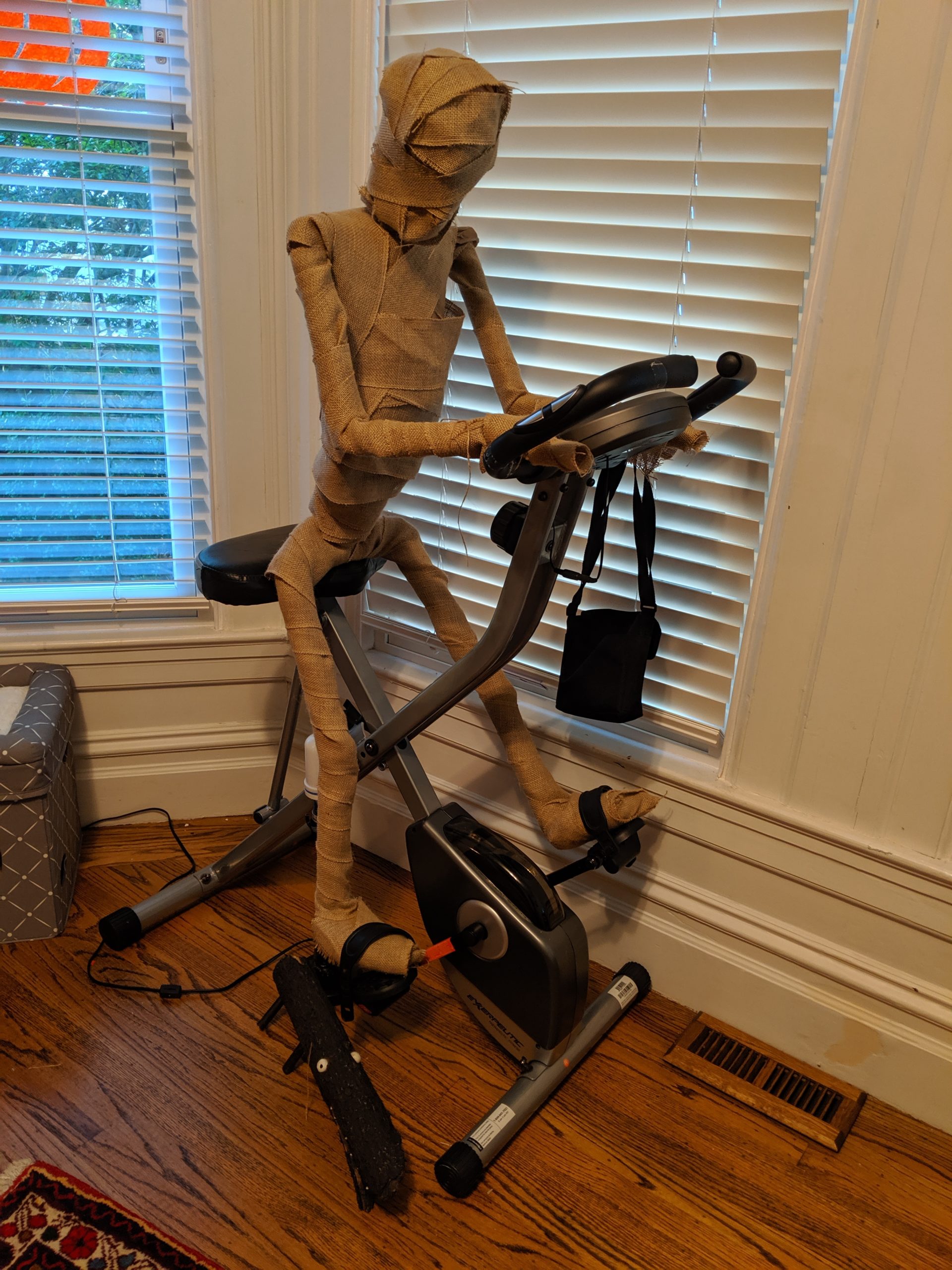
George the mummy exercising
In this photo, George is sitting on a stationary bicycle. This shows off how George’s limbs can move and that he can be detached from the lamppost. It also shows that George is about the same size as a normal human, which makes him more realistic and creepy.
George taking down holiday decorations with Number Three
In this video, George is taking down Christmas decorations with Number Three, showing off how well he stands and how much he enjoys wearing hats. He is also sturdy enough to hold Christmas tree ornaments without his arm bending.
We saw the need for a new robot for halloween, so we made one. This is our steampunk squirrel powered robot Number 3. We wanted it to be as big as a kid to help with our Halloween decorations. Our other robots were small and not easy to see. Our plan was for a big robot with lights and room to grow as we came up with new ideas.
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
Getting started
These are some of the parts that we used. We gathered most of it from unused parts from other projects. This project ended up being a great way to recycle old parts and scapes and it made it look even more steam-punky.
Scrape parts
We used PVC pipes for the skeleton of our robot because its strong and lightweight. Also we had fitting from remodeling that would attach to the pipes and let us hangs details. The pipes are standard so if we did need to buy anything it would be easy.
Completed Robot
The image to the right is the completed robot. The starting images ended up not as good as we expected so the final image was the best to show how the tubing was used. First, we cut the pipes to the right size using one of us to figure out lengths arms, legs and spine. Then we assembled it and added feet to keep it stable as we worked. The feet were harder than expected to get the right balance and weight. We used concrete bolts with extra washers as needed.
Then we assembled the PVC pipes and painted it with two coats. The first was sliver; the second was bronze. Next, we used an old security camera mount and attached a plastic jar on the neck. We added a toy squirrel inside and a few parts that looked like little controls for it. We named the squirrel Professor Brookenhoff.
For a fake engine core we used an old battery powered lantern connected to an old water bottle.
Assembling the gear box
Now we started on the fake control box. To make is steampunk we used gears and only a few wires. Then we assembled the gears to control the robot. We used old wood as a base and stain and distressed it by hitting it with a hammer.
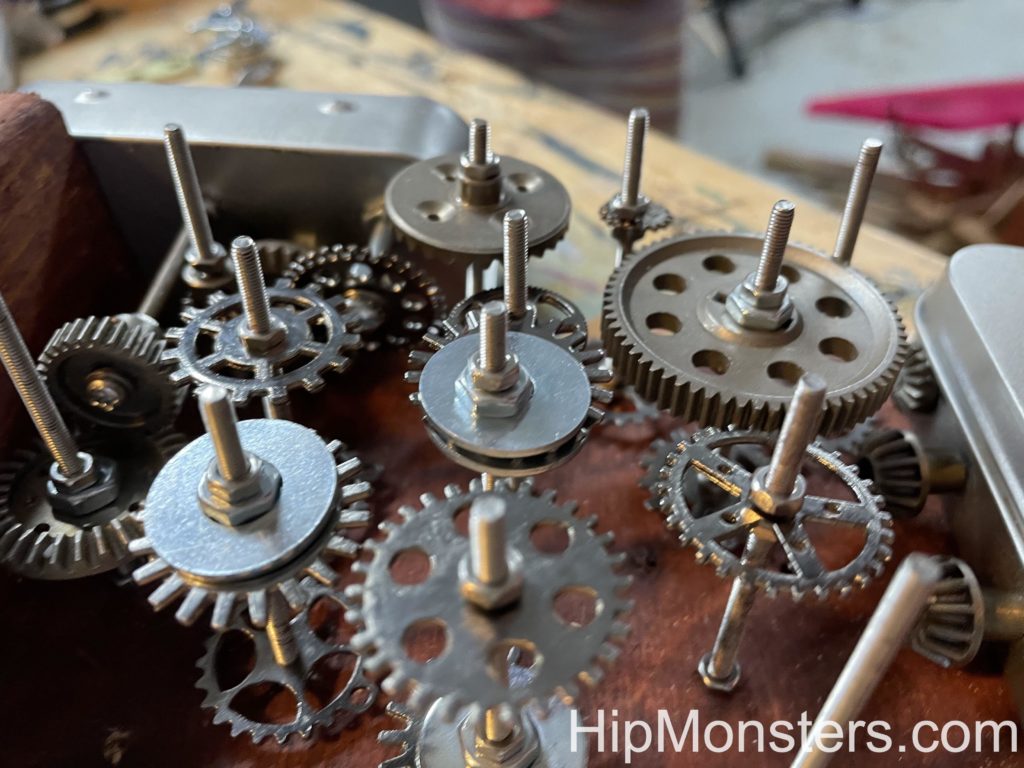
After that, we drilled a bunch of holes on the back and put thin, long bolts through them to create a framework for the gears. Before we assembled it we laid out the gears on the table in the pattern we wanted then transferred the gears to the rig. You must remember to lay out the gears in the opposite way you want them in the rig.
Side view of the gear box
Here is a view of gears completed with the control boxes on each side.
The gears took the most time and ended up being a lot harder than we imagined. It was difficult to screw the tiny nuts into place to give it a 3d look. Also, the bolts proved to be sharp. We attached some gears to the side of the control boxes so it would look like they actually controlled the gears.
Close up of the gear box
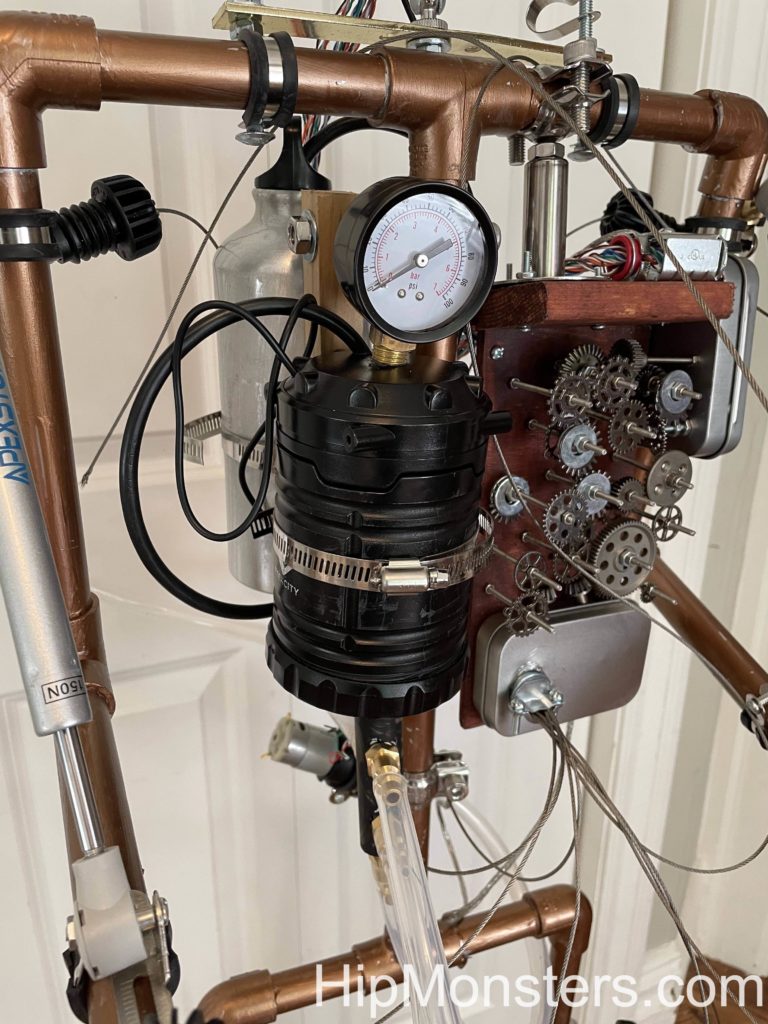
Then we attached a box to run the wirer through. We had a plan on the gears, engine, wire, pistons that we made before we started work that was our best attempt at design an honest working robot. The things we added is what Number 3 would have needed if it was real.
Side view
We then added a second box next to the gears for attaching the control wires.
Close up
Here is a close up of the gears. Getting a 3-D design is important to make it look real. Each gear needs two bolts. One on top and one on the bottom. Make sure they are tightly screwed together.
Back view
Now we focused on putting on details that would make it look like Number 3 could move. Since it was supposed to be steam powered we used four left over pistons. We attached pneumatic tubing to the pistons then attached the other end to the engine. The idea is the power from the engine would create steam, and Professor Brookenhoff would give commands to the gears which would send the steam to the right piston to make it move. The idea of the head came from Carmichael from The Umbrella Academy.
Close up of the feet
As we added more details to Number 3, we also needed to add more heavy things to the feet for stability.
Close up of the head
A close up of Professor Brookenhoff piloting Number 3.
Close up of the chest
A close up of the tubing from the engine to the joints.
Side View
Number 3 from side view. Here you can see the hands which also ended up being hard to make. Finally we made the hands out of wires and springs so it can hold things.
Born from one of our favorite bushes and a failed costume, Lin the dragon was our most complex monster at that time.
Flying free!
Lin has posable legs, tail and wings. The legs can barely support her so we decided to hang her from the ceiling to watch over us as we craft.
Side viewClose up of a wing joint
The wings are from a dragon costume we were building that proved to be too heavy. The tail is made by repeatedly cutting the log and threading a steal wire through them to secure it.
The hummingbird monster was made from a branch too weak to be used for other projects. We decided to make it into a hummingbird because it already had a long beak, and the body was already shaped like a bird. After lots of trimming, sanding, and bees wax, we added felt and wire wings.
Bottom view
Hung from the ceiling, the humming bird monster comes to life.
We call this monster the Anteater. The Anteater monster was a wonderful branch that was too split to make a good wand or use in other projects. After we stabilized the splitting and cut out all the rotted wood, we sanded her and coated her heavily in bees wax.
Side view
At first we thought of mounting Anteater on the wall as if she was a trophy, but then the Sister’s team thought of having her appear to climb out of the wall. We then used a picture frame we were working on and created a fake window using the picture frame, paint, and plexiglass for her to climb out of. With a window as a mount, she made a great addition to our living room.
The Hip Monsters team does not like trees going to waste so whenever we stumble upon a piece of wood too rotten or misshapen to be used for out projects, we create a wooden monster!
Allie!
Born from a dead branch of a juniper bush, this monster is built to protect a child’s room. It is very possessive and will only allow one monster in the room at a time. Perfect for making sure human children have a restful nighttime sleep.
Allie from the front.
We made Allie’s eyes out of two styrofoam balls.
Allie from the rear.
Allie was one of our first monsters and is at the front of our house very Halloween!